L’idée n’est pas de moi, on trouve sur internet différents projets ‘open source’ et produits commerciaux dérivés de ces projets. (CG Scale, GliderCdG)
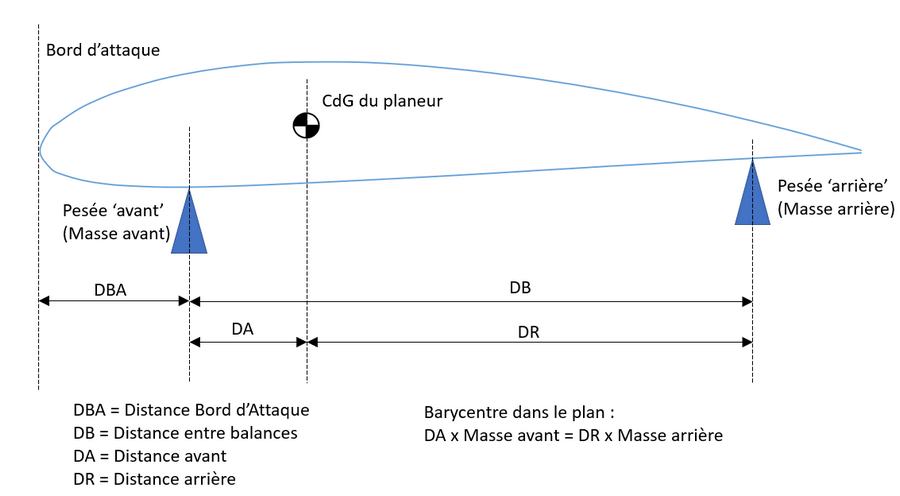
Le principe est assez simple, à l’aide de 2 balances, on mesure une masse ‘à l’avant’ et une masse ‘à l’arrière’ du planeur. En connaissant la distance entre les 2 points de pesée ‘avant’ et ‘arrière’, on est capable de calculer le barycentre, soit le centre de gravité (CdG). En connaissant la distance du bord d’attaque de l’aile au point de pesée ‘avant’, on peut recaler la distance du CdG au bord d’attaque (BA) de l’aile.
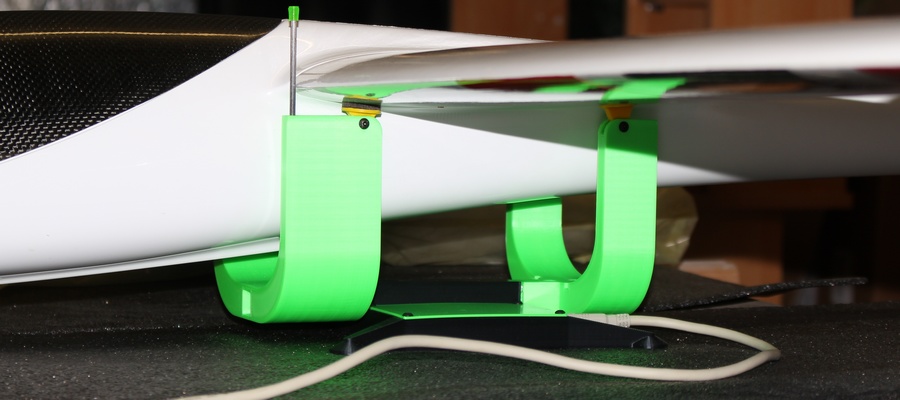
Pour la mise en œuvre, les points de pesée sont ramenés sur l’aile, comme représenté ci-dessous.
Principe de calcul du CdG du planeur
Electronique et capteurs
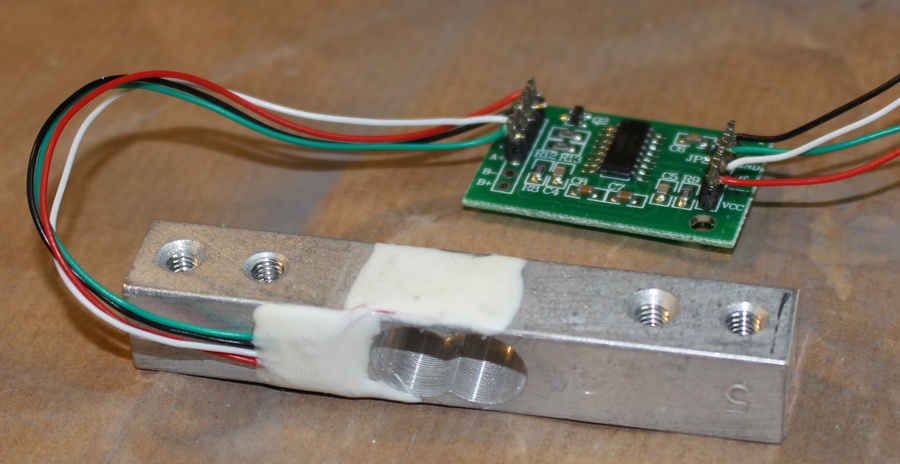
La mesure des masses est réalisée par 2 balances électroniques. Ces balances sont constituées d’une poutre en aluminium équipée de jauges de contraintes et d’un circuit électronique de mesure. Chaque carte électronique intègre un composant HX711 réalisant la mesure sur le pont Wheatstone, la numérisation, et la transmission sur une liaison série numérique synchrone.
On trouve facilement ces balances (appellation ‘Load Cell’ ou YZC-133) et les cartes HX711 sur Ebay par exemple, pour quelques Euros.
Dimensions des capteurs : 80mm x 12.7mm x 12.7mm
Modèle : 5kg
Poudre balance et carte HX711
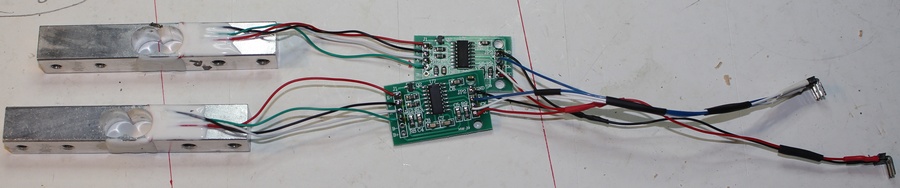
L’alimentation des 2 cartes HX711 est prélevée sur le 5V de la carte Arduino.
Câblage des jauges sur les cartes HX711 :
E+ : fils rouge
E- : fil noir
A- : fil blanc
A+ : fil vert
Câblage des cartes HX711 avec la carte Arduino :
SCK HX711 Balance avant : A0 Arduino
DOUT HX711 Balance avant : A1 Arduino
SCK HX711 Balance arrière: A2 Arduino
DOUT HX711 Balance arrière: A3 Arduino
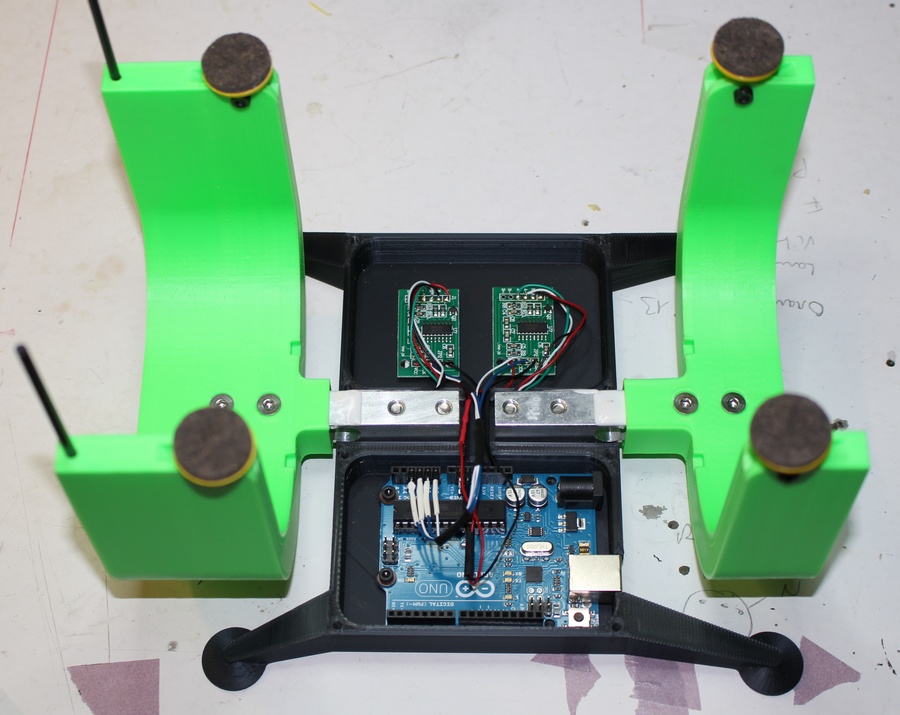
2 balances câblées
La gestion des balances est réalisée par une carte Arduino UNO.
Fonctions implémentées (logiciel Arduino) :
Communication avec les 2 cartes HX711
Communication avec le PC d’IHM (Interface Homme Machine)
Calibration des balances avec une masse de référence connue
Sauvegarde des calibrations des balances en EEPROM (Mémoire non volatile)
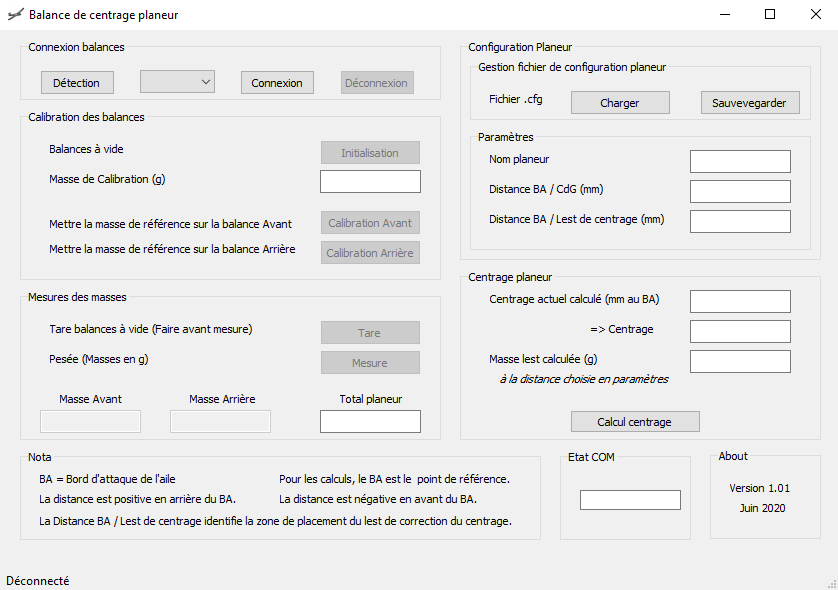
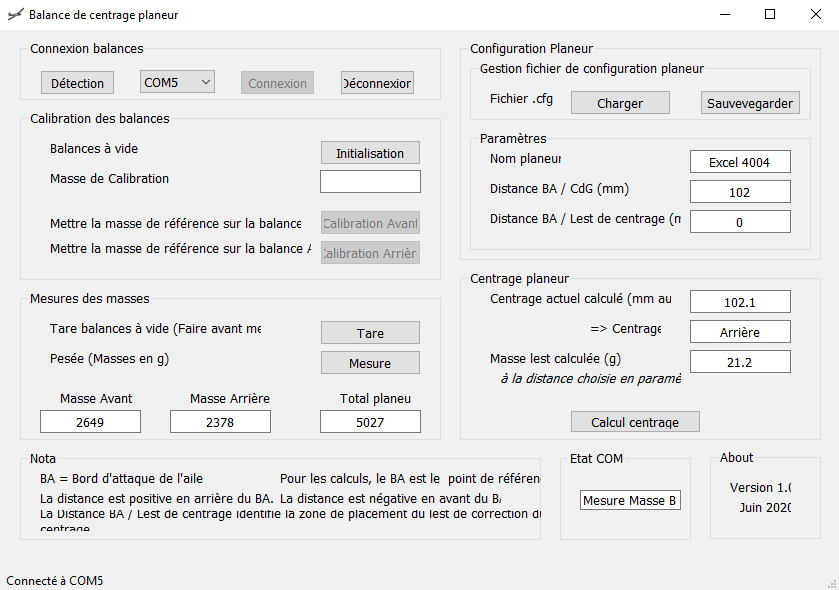
La mise en œuvre du système est réalisée par un logiciel sur PC / Windows. La carte Arduino est connectée à un port USB du PC permettant ainsi l’alimentation et la communication. Ce logiciel PC a été développé avec QT.
Fonctions implémentées (logiciel PC) :
Communication avec la carte Arduino
Gestion des fonctions des balances (Calibration, Tare, Pesée)
Saisie des paramètres du planeur (Distance BA / CdG souhaitée, Distance BA / Lest de réglage)
Sauvegarde et chargement des paramètres du planeur
Calcul du centrage
Calcul du lest éventuel à mettre en place (si on ne peut pas déplacer suffisamment la batterie par exemple)
IHM PC
Mécanique
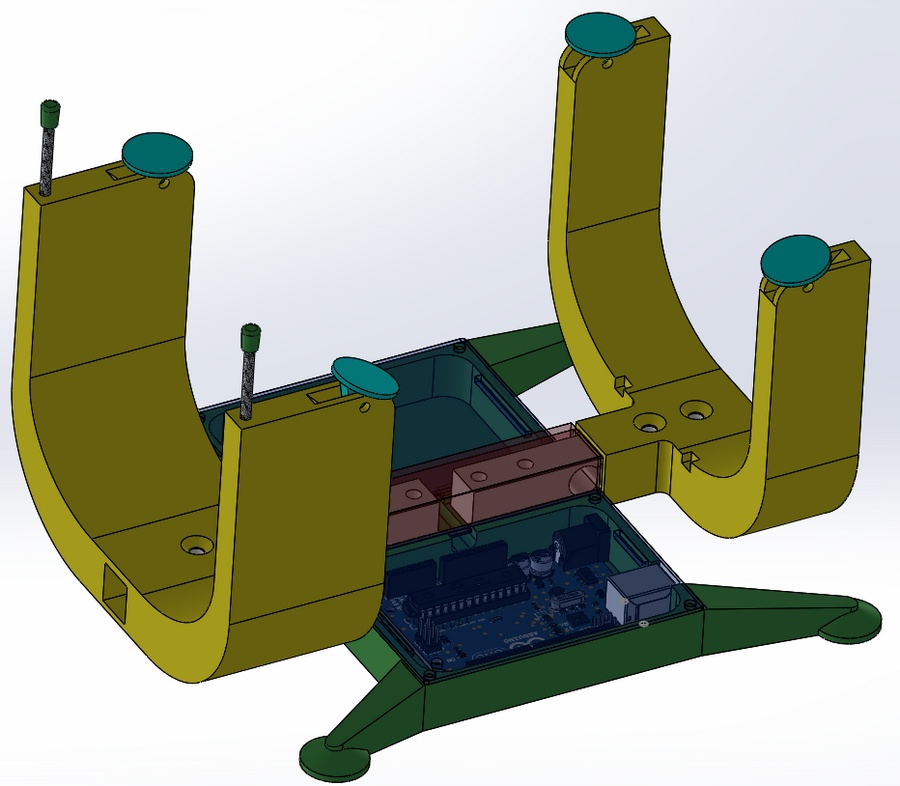
Les 2 balances et la carte Arduino sont intégrées dans un ensemble mécanique constitué principalement d’un socle et des 2 U sur lesquels l’aile du planeur vient en appui. Les 4 plots sur lesquels l’aile vient en appui sont ‘libres’ afin de s’adapter à la courbure de l’aile. Les arrêts de bord d’attaque sont en tube carbone de 3mm avec un embout de protection. Le socle est refermé par 2 couvercles, et un cache vient sur les 2 poutres, il est maintenu par les 2 couvercles.
Modélisation 3D
Les pièces ont été réalisées en impression 3D PLA, sauf pour les embouts des tiges carbone d’appui du BA qui sont en TPU. Les 4 plots (jaune) sont en ABS, mais ils pourraient être en PLA.
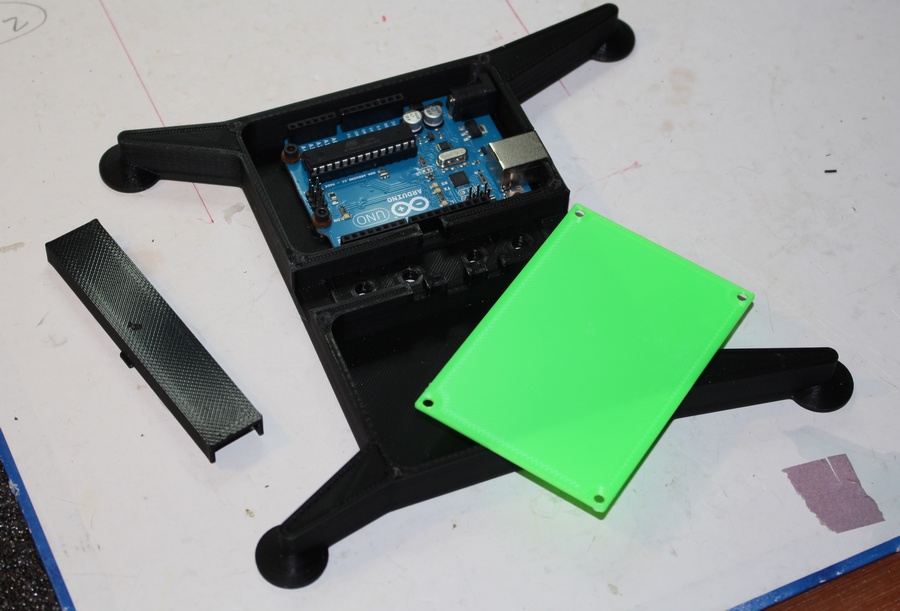
Socle et carte Arduino UNO
Câblage des cartes
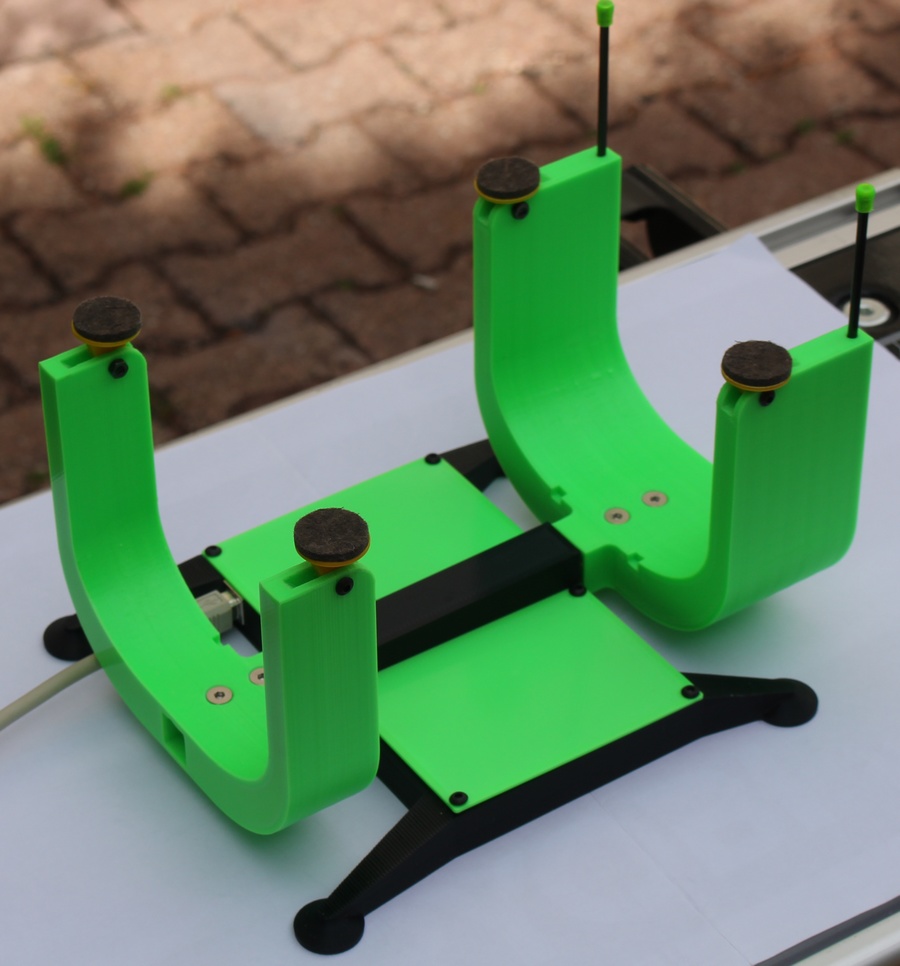
Balance complète
Tests
Les 2 balances ont été testées séparément avec des masses connues. Les calculs ont été vérifiés avec des cas tests, calculés dans un tableur ‘Excel’. Puis les essais sur planeurs ont été fait sur mon Grafas et mon Excel 4004.
Pour le Grafas, la notice donne une plage de centrage de 78 à 85mm (du bord d’attaque). Le centrage adopté en vol est plus arrière. Sur ma balance ‘balancier’ Multiplex, je trouve un centrage autour de 92.5mm / 93mm. Sur la balance électronique, le centrage mesuré est de 93mm pour une masse de 1874g.
La notice Simprop de l’Excel 4004 donne un centrage nominal à 90mm, avec un marquage de fuselage jusqu’à 102mm. A 90mm, le centrage est ‘très avant’, je vole avec 102mm. Le passage sur la balance électronique donne une masse de 5027g pour un centrage à 102.1mm.
Excel 4004 sur la balance de centrag
Améliorations
La balance fonctionne correctement. Pour un planeur de 5kg comme l’Excel, le socle de la balance est à peine assez rigide.
Il subsiste un problème d’affichage du texte sur l’interface sur mon PC portable (non présent sur mon PC fixe, voir les 2 photos de l’interface ci-dessus et dans le corps de l’article)
Nota : Le problème de texte provient d’un zoom appliqué à l’affichage Windows.
Réalisations de la balance à partir de mes fichiers
Je suis toujours intéressé par les retours des modélistes ayant réalisés un projet à partir de mes fichiers et informations.
Merci pour cet article très intéressant, cela ma donné envie d’en fabriquer une pour arrêter de centrer mes planeurs sur les doigts !
Je suis en train d’imprimer les différentes pièces, est-il possible de partager votre logiciel PC et la librairie arduino associée ?
Bonjour, j’ai comme projet cet été de fabriquer cette balance électronique. Pourriez-vous m’indiquer où trouver les STL des pièces 3D s’il-vous plaît, ainsi que les logiciels Arduino et PC.
Merci d’avance.
Bonjour. Cette balance électronique est une petite merveille, mes félicitations.
Comme je désire en fabriquer une, est il possible d’avoir les logiciels et les fichiers STL.
Si on monte des capteurs plus puissants et qu’on renforce le socle pour des avions jusqu’à 10Kg les logiciels seront ils compatibles?
Merci.
Cordialement.
Daniel
bonjour et bravo c est fantastique
pourriez vous me transmettre les fichiers stl pour les deux balances (avion et planeur)ainsi que tous les logiciels nécessaires pour faire fonctionner tous cela ce serait vraiment sympa ps: je ne m y connait pas trop en arduino
encore bravo pour votre travail c’est génial
Bonsoir,
très bon projet. j’avais fait une balance avec trois détecteurs mais c’est moins précis.
auriez-vous les fichiers STL et le programme pour l’arduino et le PC ?
Bonjour,
Je suis intéressé pour faire cette balance pour planeur. J’ai commandé les éléments électroniques, je les attends.
Serait il possible d’avoir les fichier STL et les programmes pour l’Arduino et le PC.
Super travail, beau projet.
Merci d’avance
Georges
Bonjour,
Super projet, je suis également intéressé.
Est-ce possible d’avoir les logiciels et les fichiers STL ou encore mieux les sources ?
Merci d’avance
Bonjour,
Votre balance me plait beaucoup et je me suis lancé dans une fabrication.
Auriez vous l’amabilité de partager votre logiciel PC et ce qu’il faut pour l’arduino?
Merci
Cordialement
Bonjour,
Félicitation pour votre réalisation cela change des bricolages maison. Je suis très intéressé par la réalisation de votre balance, serait’il possible d’obtenir les fichiers STL et les logiciels pour l’arduino? par avance merci et bonne continuation.
Amitiés modéistiques
Bonjour,
Bravo pour votre réalisation . Je suis très intéressé par la réalisation de votre balance, serait’il possible d’obtenir les fichiers
STL et le code pour l’arduino et lePC?
par avance merci et bonne continuation.
Bonjour Thierry,
Merci pour le partage au sujet de la balance de centrage.
Pourriez-vous m’envoyer les fichiers STL ainsi que la partie Arduino svp?
Cordialement
Bonjour.
Bravo pour votre travail et le partage.
Je trouve que le principe d’avoir les réglages sur PC et top.
Je suis très intéressé par vos docs (Programme PC, stl, programme arduino, etc…) pour la balance avion et planeur car je compte bien faire les deux.
Merci d’avance
Bonjour Thierry,
Et tout d’abord un grand bravo pour cette création, c’est vraiment génial, surtout quand on aime la précision et/ou qu’on a de gros doigts…
Je suis aussi évidemment intéressé pour un fabriquer une et avoir la doc si c’était possible.
Je me pose la question de savoir si vous pensiez qu’il serait possible de développer une version autonome qui n’aurait pas besoin de PC (je pense à une utilisation sur le site de vol, par exemple quand on commence à balaster des planeurs…), un peu comme le modèle de chez FlashRC.
En tous cas, bravo, c’est top !
Cédric
Bonjour,
Un grand bravo pour votre réalisation . Je suis très intéressé par la réalisation de la balance, serait’il possible d’obtenir les fichiers STL, Arduino et PC?
Merci d’avance
Bonjour,
superbe balance, j’en ai une pour mes planeur avec des fuselages fins, j’aimerai bien avoir des bras plus large comme vous.
Pourriez-vous m’envoyer éventuellement te fichier STL des bras svp?
Merci.
Cordialement.
bonjour je viens de tomber sur ce petit montage et ca me donne envie de le faire pourriez vous me faire parvenir les fichiers de montage
en vous remerciant
super trop bien cette balance je me suis lancée dans l’aventure me rest plus qu’à programmer pourriez vous m’envoyer la programmation de la carte arduino et le schéma de branchement des différents composants merci d’avance
Bonjour. Je ne sais pas si c’est toujours d’actualité mais je serais heureux de pouvoir bénéficier des fichiers STL et du logiciel.
Je viens de commander l’électronique donc j’ai un peu de temps pour l’impression. Auriez vous des recommandations particulières par rapport à la calibration vu que les capteurs présentent sans doute des variations. Idem en ce qui concerne l »impression vu que celà impacte la masse et la solidité. Merci en tout cas:)








Bonjour,
Merci pour cet article très intéressant, cela ma donné envie d’en fabriquer une pour arrêter de centrer mes planeurs sur les doigts !
Je suis en train d’imprimer les différentes pièces, est-il possible de partager votre logiciel PC et la librairie arduino associée ?
Merci d’avance,
Cordialement,
Bonjour,
Je suis tres interesse par votre article. ou je peux etouver les fichiers STL et les logiciels pour l’arduino et lePC?
Merci d’avance
Voir email.
Bonjour, j’ai comme projet cet été de fabriquer cette balance électronique. Pourriez-vous m’indiquer où trouver les STL des pièces 3D s’il-vous plaît, ainsi que les logiciels Arduino et PC.
Merci d’avance.
Bonjour. Cette balance électronique est une petite merveille, mes félicitations.
Comme je désire en fabriquer une, est il possible d’avoir les logiciels et les fichiers STL.
Si on monte des capteurs plus puissants et qu’on renforce le socle pour des avions jusqu’à 10Kg les logiciels seront ils compatibles?
Merci.
Cordialement.
Daniel
Merci beaucoup.
Je vous ai envoyé un email.
bonjour et bravo c est fantastique
pourriez vous me transmettre les fichiers stl pour les deux balances (avion et planeur)ainsi que tous les logiciels nécessaires pour faire fonctionner tous cela ce serait vraiment sympa ps: je ne m y connait pas trop en arduino
encore bravo pour votre travail c’est génial
Bonsoir,
très bon projet. j’avais fait une balance avec trois détecteurs mais c’est moins précis.
auriez-vous les fichiers STL et le programme pour l’arduino et le PC ?
Bravo pour votre travail
Bernard
Email envoyé.
Bonjour,
Je suis intéressé pour faire cette balance pour planeur. J’ai commandé les éléments électroniques, je les attends.
Serait il possible d’avoir les fichier STL et les programmes pour l’Arduino et le PC.
Super travail, beau projet.
Merci d’avance
Georges
Je vous ai envoyé le lien de téléchargement.
Bonjour,
Super projet, je suis également intéressé.
Est-ce possible d’avoir les logiciels et les fichiers STL ou encore mieux les sources ?
Merci d’avance
Envoyé également …
Bonjour,
Belle réalisation. Je suis très intéressé, puis-je disposer des fichiers STL et programmes, svp ?
Merci d’avance, cordialement.
interessé par cette balance possible de recevoir les liens pou les fichiers stl et la programmation arduino merci
Bonjour,
Très belle réalisation. Est-il possible d’avoir le lien pour les fichiers STL et la programmation arduino?
Merci beaucoup.
Bonjour,
Votre balance me plait beaucoup et je me suis lancé dans une fabrication.
Auriez vous l’amabilité de partager votre logiciel PC et ce qu’il faut pour l’arduino?
Merci
Cordialement
Bonjour,
Félicitation pour votre réalisation cela change des bricolages maison. Je suis très intéressé par la réalisation de votre balance, serait’il possible d’obtenir les fichiers STL et les logiciels pour l’arduino? par avance merci et bonne continuation.
Amitiés modéistiques
Envoyé.
Bonjour Christian,
Avez-vous pu réaliser cette fantastique balance ? Ca a l’air de marcher terrible, ca me tente bien !
Cédric
Bonjour, Pourriez-vous m’indiquer où trouver les STL des pièces 3D
merci par avance
amitiés
Bonjour,
Bravo pour votre réalisation . Je suis très intéressé par la réalisation de votre balance, serait’il possible d’obtenir les fichiers
STL et le code pour l’arduino et lePC?
par avance merci et bonne continuation.
Merci d’avance
Bonjour Thierry,
Merci pour le partage au sujet de la balance de centrage.
Pourriez-vous m’envoyer les fichiers STL ainsi que la partie Arduino svp?
Cordialement
Bonjour,
L’adresse email fournie doit être erronée.
Bonjour.
Bravo pour votre travail et le partage.
Je trouve que le principe d’avoir les réglages sur PC et top.
Je suis très intéressé par vos docs (Programme PC, stl, programme arduino, etc…) pour la balance avion et planeur car je compte bien faire les deux.
Merci d’avance
Bonjour Thierry,
Et tout d’abord un grand bravo pour cette création, c’est vraiment génial, surtout quand on aime la précision et/ou qu’on a de gros doigts…
Je suis aussi évidemment intéressé pour un fabriquer une et avoir la doc si c’était possible.
Je me pose la question de savoir si vous pensiez qu’il serait possible de développer une version autonome qui n’aurait pas besoin de PC (je pense à une utilisation sur le site de vol, par exemple quand on commence à balaster des planeurs…), un peu comme le modèle de chez FlashRC.
En tous cas, bravo, c’est top !
Cédric
Bonjour,
Un grand bravo pour votre réalisation . Je suis très intéressé par la réalisation de la balance, serait’il possible d’obtenir les fichiers STL, Arduino et PC?
Merci d’avance
Bonjour,
superbe balance, j’en ai une pour mes planeur avec des fuselages fins, j’aimerai bien avoir des bras plus large comme vous.
Pourriez-vous m’envoyer éventuellement te fichier STL des bras svp?
Merci.
Cordialement.
bonjour je viens de tomber sur ce petit montage et ca me donne envie de le faire pourriez vous me faire parvenir les fichiers de montage
en vous remerciant
Bonjour et bravo pour la réalisation et votre partage .
Serait-il possible d’obtenir les fichiers .stl le programme pc ainsi que celui de l’ardue I.
Merci infiniment par avance.
bonjour,
je me suis mis depuis peu sur des planeurs et je suis intéresser par ce projet.
pouvez vous me faire parvenir les fichiers.
Merci.
super trop bien cette balance je me suis lancée dans l’aventure me rest plus qu’à programmer pourriez vous m’envoyer la programmation de la carte arduino et le schéma de branchement des différents composants merci d’avance
Bonjour et bravo pour la réalisation!
ou trouve t on les fichiers et programme pour faire tourner tout ca ?
Merci d’avance
Bonjour
Bravo pour votre balance
est-ce possible d’avoir les éléments pour en construire une
Merci
Bonjour. Je ne sais pas si c’est toujours d’actualité mais je serais heureux de pouvoir bénéficier des fichiers STL et du logiciel.
Je viens de commander l’électronique donc j’ai un peu de temps pour l’impression. Auriez vous des recommandations particulières par rapport à la calibration vu que les capteurs présentent sans doute des variations. Idem en ce qui concerne l »impression vu que celà impacte la masse et la solidité. Merci en tout cas:)
Bonjour,
Ou pourrai je télécharger les fichiers pour utiliser cette balance qui m’à l’air au top, merci
Salut, j’ai tout acheté pour fabriquer la balance, il me manque les fichiers STL. Comment les obtenir ?