L’objectif est de monter une configuration permettant d’embarquer une caméra GoPro Hero 6 tout en ayant un temps de vol supérieur à un 5″. (au moins 15 minutes)
Le chassis
Le chassis carbone 7″ est un JT280. Il est disponible sur les sites chinois Banggood et Aliexpress. Il est livré dans une petite boîte en carton, les pièces sont dans des sachets plastiques. Il n’y a pas de notice.
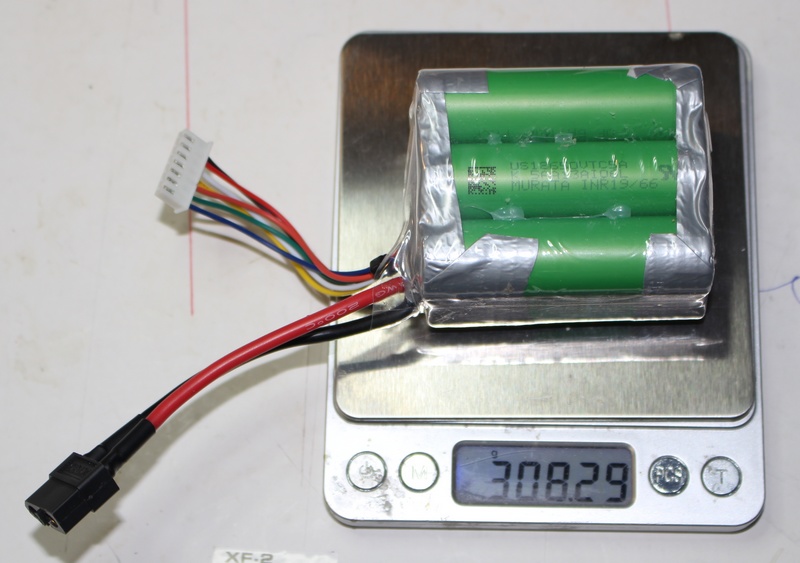
Batterie Lithium Ion 5S / 2600mAh Référence éléments : Sony VTC5A Documentation VTC5A
Courant de décharge maxi : 35A Courant de charge maxi : 2.5A
Passage en 6s. La tension du pack Liion 5s est un peu limite en fin de vol. Les packs ont été passés en 6s.
Montage
Installation des moteurs Brotherhobby Avenger V2
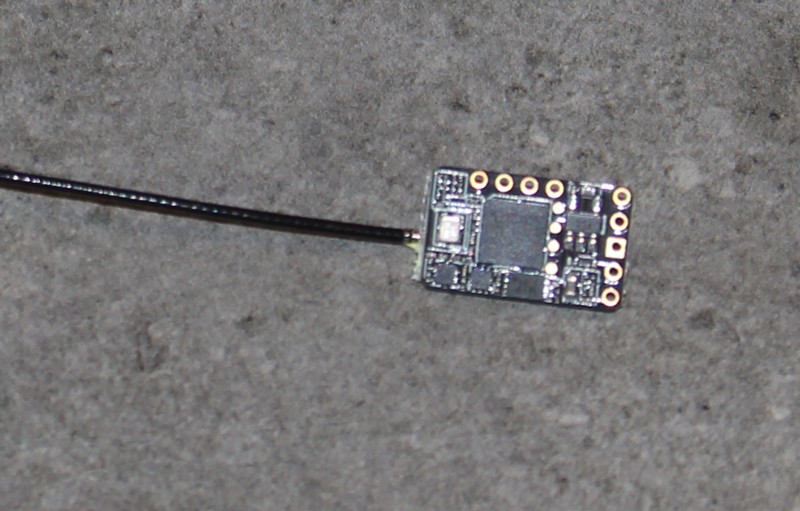
Modélisation 3D pour installation du récepteur R9 mini et installation de l’antenne 868MHz
Masse : 3g (TPU SaintSmart vert fluo)
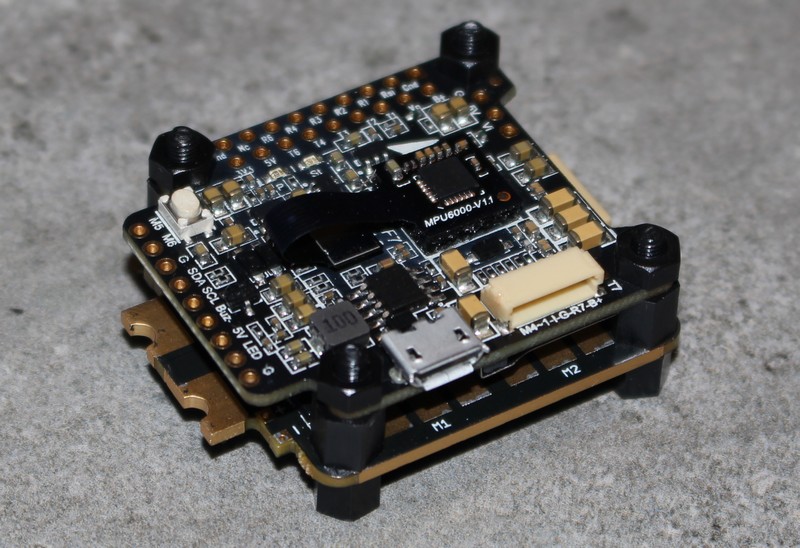
Montage stack FC / ESC et queue pour récepteur R9mm
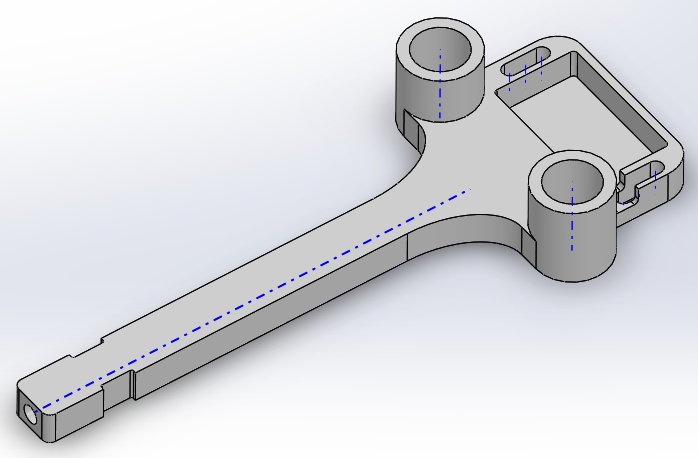
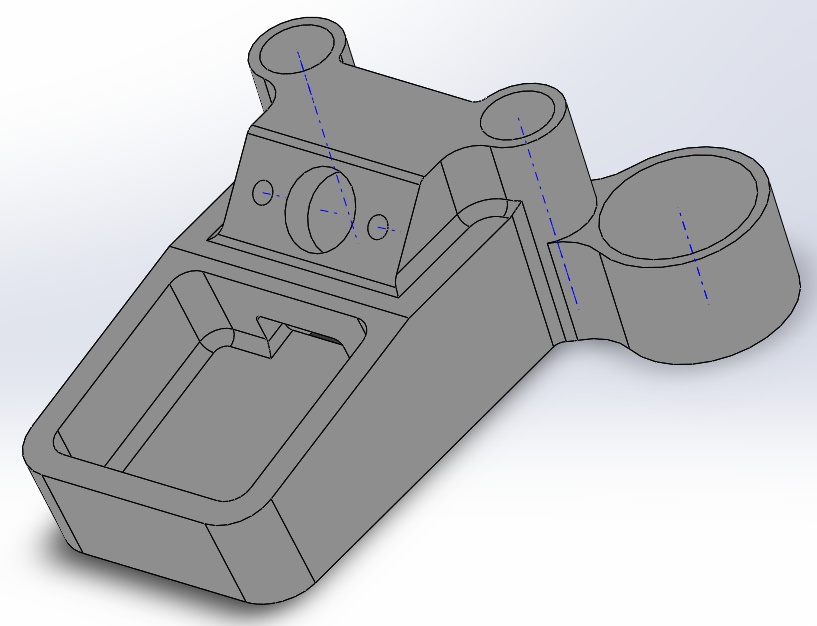
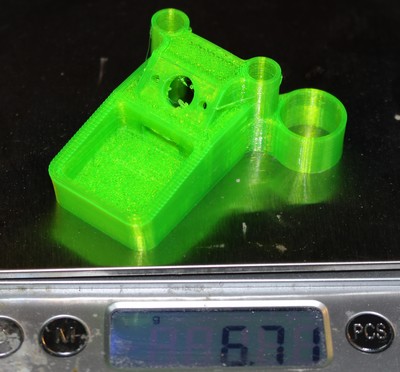
Modélisation 3D pour installation du GPS Matek et antenne Foxeer Lolillop
Masse : 6.7g (TPU SaintSmart vert fluo)
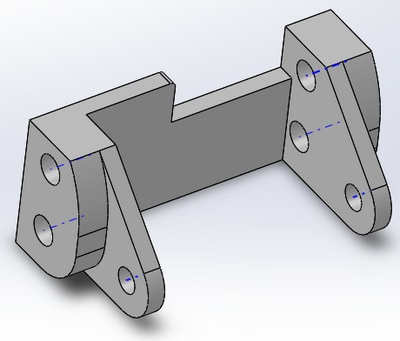
La Ratel est au format micro et le chassis au format standard. J’ai donc réalisé un adaptateur en impression 3D (PLA).
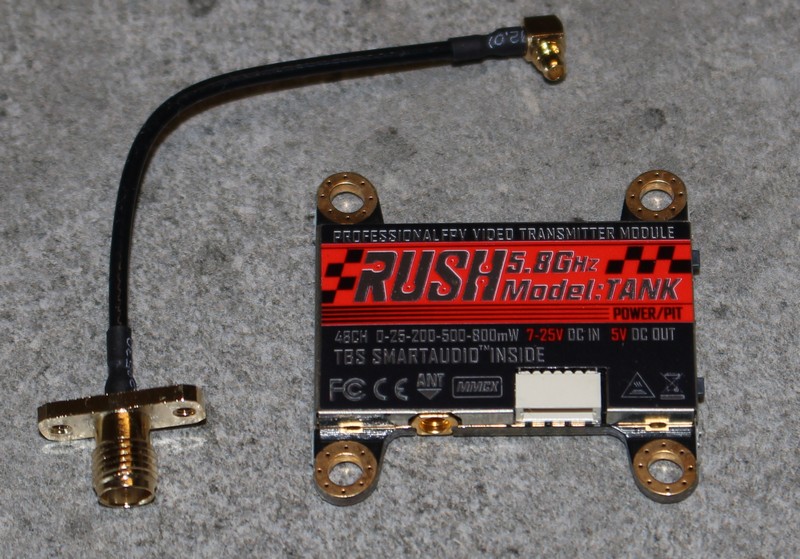
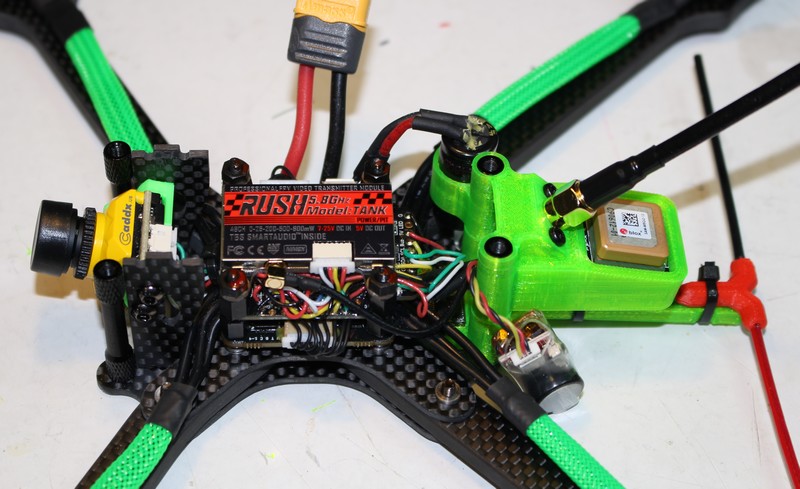
Montage Ratel, VTX, GPS … Le chassis étant assez haut, il permet de monter 3 cartes dans la pile.
Modélisation 3D des pieds
Masse : 2g (TPU SaintSmart vert fluo)
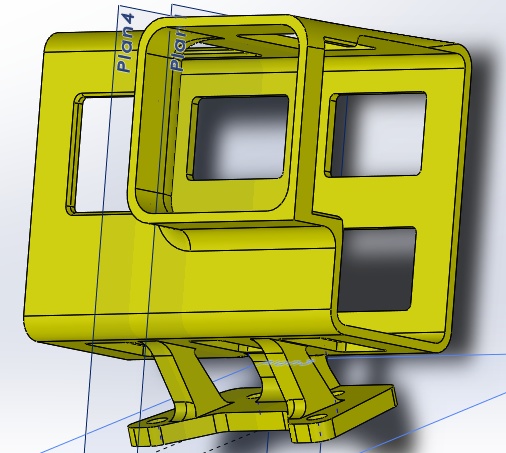
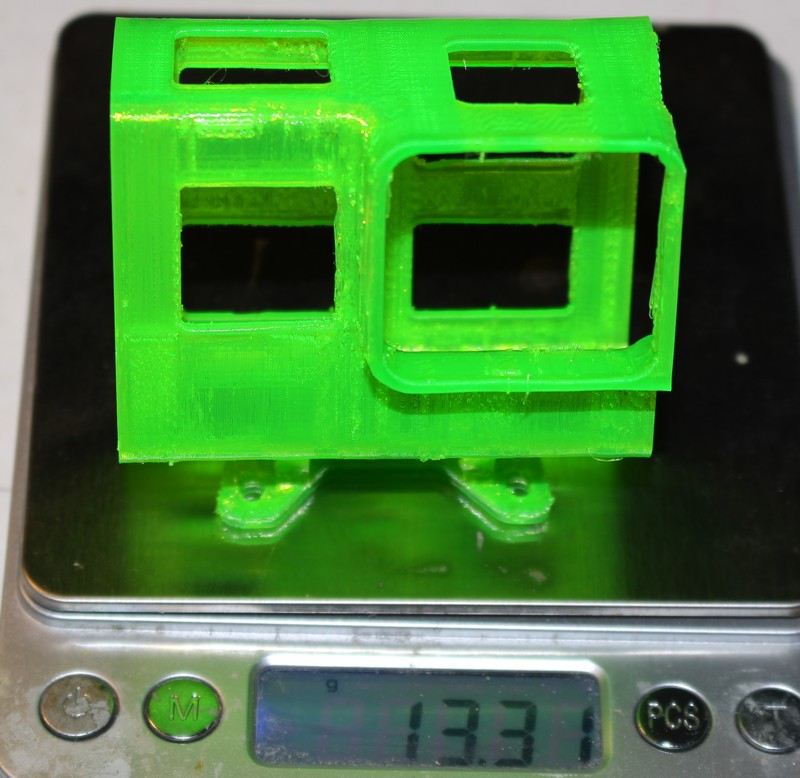
Modélisation 3D du support GoPro Hero 6 (Angle de 23°)
JT280 complet
Configuration logicielle
La carte contrôleur de vol (FC) est chargée avec Betaflight 4.1.4.
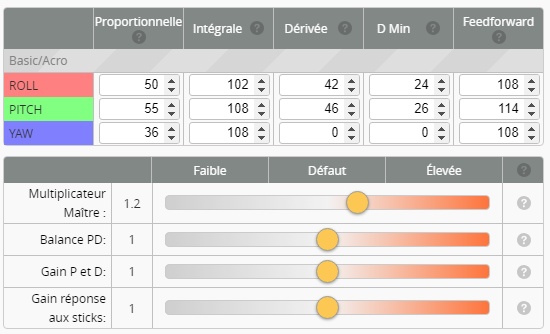
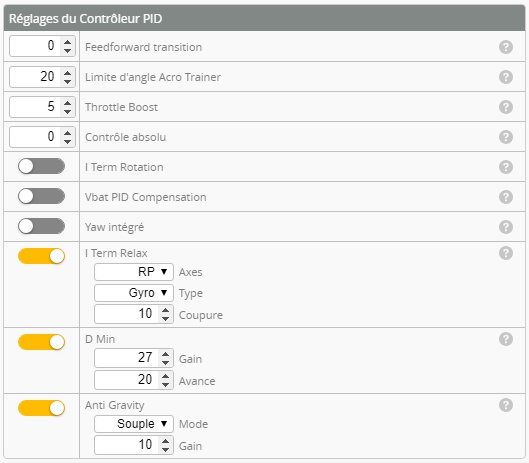
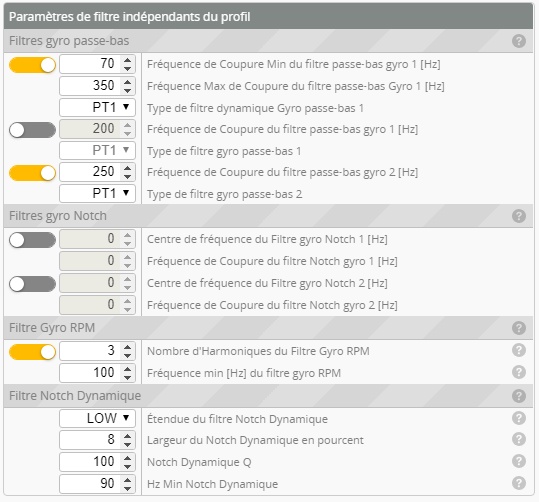
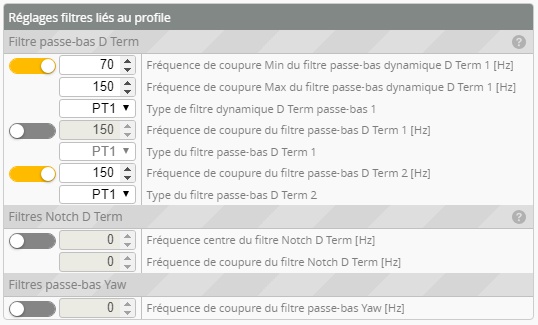
Les filtre et PIDs
La dynamique d’un 7″ est assez différente de celle d’un 5″ à cause de la masse, de la taille du châssis, et de l’inertie des hélices. Les réglages de base de Betaflight sont adaptés à des châssis 5″. Il faut les adapter.