Introduction
BLHeli 32 est la troisième génération de la famille des firmwares ESC BLHeli. (Après BLHeli (8 bits) et BLHeli S (8 bits))
Il fonctionne sur μcontroleur ARM 32 bits, ce qui permet des performances supérieures (PWM 48Khz …).
Les firmwares BLHeli et BLHeli S étaient Open Source,
BLHeli 32 est payant pour le fabriquant, ce qui fait que certains ESC bas coûts restent encore sur plateforme 8 bits avec les anciens firmwares.
‘ESC’ est utilisé pour ‘Electronic Speed Controleur’.
Paramètres de BLHeli 32
Nota :
Les paramètres accessibles et les valeurs par défaut peuvent varier d’un modèle d’ESC à un autre.
Certains paramètres sont simlaires avec BLHeli (8 bits) ou d’autres firmwares ESC avions/planeurs.
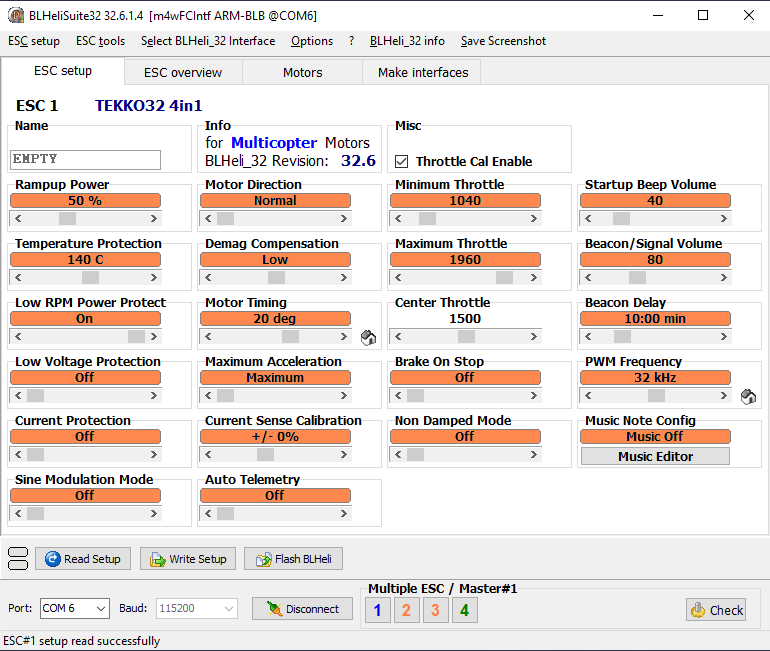
Ci-dessous, interface BLHeli Suite 32 des paramètres d’un ESC 4in1 Holybro Tekko 32.
Rampup Power
Valeur par défaut : 50%
‘Rampup Power’ limite la puissance délivrée au moteur lors d’une augmentation rapide de la commande des gaz.
Dans le cas d’une augmentation rapide des gaz, l’ESC va envoyer un fort courant (pic de 100A par exemple) dans le moteur pour le faire accélérer très rapidement.
Le moteur et son hélice ont une certaine inertie et il ne sera donc pas possible d’augmenter instantanément la vitesse de rotation.
On peut donc considérer qu’une partie de l’énergie envoyée (pic de courant) au moteur est gaspillée car il ne peut pas suivre la commande …
Par défaut à 50%, cette valeur peut être abaissée afin de limiter les pics de courants (et donc les perturbations électromagnétiques) et améliorer l’efficacité énergétique.
Si le Rampup Power est trop bas, le moteur aura une réponse plus lente.
Jusqu’à 20%, la différence de réponse moteur est négligeable. En dessous, il est possible que la réponse du moteur soit plus ‘molle’.
Temperature Protection
Valeur par défaut : 140°C
En cas de dépassement de la température, la puissance délivrer au moteur est limitée.
Ne pas modifier.
Current Protection
Valeur par défaut : OFF
‘Current Protection’ permet de limiter le courant maximal pouvant être délivré au moteur afin de protéger l’électronique et le moteur.
Cette protection est assez rapide et si l’on l’utilise, il ne faut pas la régler trop bas, car la réponse moteur sera plus lente.
Par exemple sur un ESC 30A, il ne faut pas régler la protection à 30A, l’ESC tolère des courants de pointe bien plus importants, 100A par exemple.
Cette fonction peut être utilisée pour obtenir une réponse plus douce du moteur en limitant le courant maxi.
Sur un ESC 4en1, le courant correspond à un seul ESC.
Low RPM Power Protect
Valeur par défaut : ON
Limite la puissance à basse vitesse de rotation.
A désactiver que dans des cas spécifiques de moteurs bas KV alimentés à basse tension.
La désactivation de ‘Low RPM Power Protect’ augmente le risque de désynchronisation de l’ESC par rapport à la rotation du moteur.
Low Voltage Protection
Valeur par défaut : OFF
Permet de choisir la tension (par élément de batterie) en dessous de laquelle l’ESC va passer en limitation de puissance pour protéger la batterie.
A ne pas activer sur un multicopter, au risque de le voir tomber …
Préférer une alarme sur la radiocommande ou dans l’OSD.
Sine Modulation Mode
Valeur par défaut : OFF
Cette fonction a pour objectif de générer des commandes moteur sinusoïdales, pour un fonctionnement plus doux.
Il ne fonctionne qu’à bas régime. Cette fonction semble encore un cours de mise au point.
Motor direction
Valeur par défaut : Normal
Permet de régler le sens de rotation du moteur sans changer le câblage des fils sur l’ESC.
Les modes bidirectionnels permettent de faire tourner le moteur dans les 2 sens (Mode 3D ou Turtle mode)
Demag Compensation
Valeur par défaut : Low
‘Demag Compensation’ est une fonction permettant d’éviter le décrochage moteur (désynchronisation entre les commandes ESC et la position du rotor du moteur).
Les symptômes de la perte de synchronisation sont soit un arrêt moteur, soit des saccades.
Cela peut se produire sur une accélération rapide à partir d’une basse vitesse de rotation.
Les moteurs n’ayant pas de capteurs de position, l’ESC se synchronise en mesurant la force contre-électromotrice induite dans les bobinages.
A basse vitesse de rotation, le signal peut être faible, ce qui peut conduire à l’impossibilité de se synchroniser.
Dans ce cas, la synchronisation est réalisée sur un timing calculé et la puissance est réduite pour protéger le moteur.
Ne pas désactiver.
Motor Timing
Valeur par défaut : 16°
‘Motor Timing’ correspond à l’angle (au temps) après lequel le courant est envoyé dans un bobinage du moteur par rapport à la synchronisation (effectuée par mesure de la force contre-électromotrice).
La valeur par défaut convient à la plupart des moteurs. En cas de décrochage ou saccades du moteur, l’augmentation de la valeur ‘Motor Timing’ peut résoudre le problème.
L’augmentation de Motor Timing va permettre d’augmenter le couple moteur au détriment de la consommation.
La valeur peut-être réglée dans la plage 16° / 25° sans rencontrer de problèmes. Entre 20 et 22, pour obtenir un bon rapport puissance / efficacité.
Le mode Auto règle l’angle pour optimiser l’efficacité énergétique.
La consommation augmente avec un angle plus élevé. Une valeur trop forte peu faire chauffer le moteur.
Maximum Acceleration
Valeur par défaut : Maximum
Cette option permet de limiter l’accélération en %/ms.
Cette option peut être utilisée pour résoudre des problèmes de désynchronisation sur de fortes accélérations..
Current Sense Calibration
Valeur par défaut : 0%
Permet de corriger l’erreur de mesure de courant de l’ESC.
Parait compliqué à calibrer précisemment …
Auto Telemetry
Valeur par défaut : OFF
En mode DSHOT, la télémesure permet remonter les informations suivantes :
– Température (°C)
– Tension (V)
– Courant (A)
– Consommation (Ah)
– Vitesse de rotation (tr/min)
En fonctionnement normal, la carte controleur de vol envoie une demande à chaque ESC pour obtenir la trame de télémesure.
En mode ‘Auto’, l’ESC envoie périodiquement la trame sans que la FC le demande. Si un seul UART est utilisé, il y a risque de collision de trame de donnée.
Throttle calibration Enable
Valeur par défaut : Enable
Permet la calibration de la course des gaz (min/max) dans les modes impulsionnels (ONESHOT, …)
Il n’y a pas de calibration dans les modes numériques DSHOT.
Minimum Throttle / Maximum Throttle
Limites basse et haute de la commande des gaz.
En mode PPM, les valeurs de commandes varient entre 1000µs et 2000µs.
Non utilisé dans les modes numériques comme DSHOT.
Center Throttle
Valeur par défaut : 1500
Défini la position centrale des gaz.
Cela n’a de sens qu’en mode bidirectionnel.
Brake On Stop
Valeur par défaut : OFF
Réglage du freinage à l’arrêt moteur.
Utilisé sur les motoplaneurs pour replier l’hélice.
Laisser OFF sur un quadcopter.
Ce type de freinage du moteur est réalisé en court-circuitant les phases du moteur.
Non Damped Mode
Valeur par défaut : OFF (Donc ‘Damped Mode’ actif)
Le ‘Damped Light Mode’ est un mode de freinage actif aussi appelé ‘Regenerative braking’.
Dans ce mode, le freinage du moteur se fait en réinjectant l’énergie de la force contre-électromotrice du moteur en rotation vers la batterie.
Ce freinage se produit lors de l’arrêt ou lorsque l’on baisse la commande des gaz afin d’atteindre le plus rapidement possible la consigne demandée (vitesse de rotation).
Il est nécessaire à la bonne réponse et stabilisation du quadcopter en permettant une meilleur réponse des moteurs en ‘ralentissement’.
Ce mode à tendance à produire des surtensions sur l’alimentation qui peuvent perburber l’électronique et bruiter la vidéo.
Pour traiter ce problème, il est conseillé de monter un condensateur (Low ESR) sur l’alimentation de l’ESC.
Startup Beep Volume
Valeur par défaut : 40
Puissance des bips sonores générés par l’ESC avec les bobinages moteurs à l’initialisation.
Attention, en augmentant cette valeur, il y a un risque d’endommagement du moteur.
Beacon / Signal Volume
Valeur par défaut : 80
Puissance des bips sonores générés par l’ESC avec les bobinages moteurs en alarme.
Le mode ‘beacon’ (balise) sert à retrouver le quadcopter en cas de failsafe par exemple, (au lieu d’utiliser un buzzer).
Attention, en augmentant cette valeur, il y a un risque d’endommagement du moteur.
Beacon Delay
Valeur par défaut : 10 minutes
Temps après lequel les bips d’alarme démarrent en absence de commande des gaz.
PWM Frequency
Valeur par défaut : 24khz
Défini la fréquence du PWM (Pulse With Modulation) des commandes des transistors MOSFET commutant le courant vers les enroulements du stator du moteur.
La fréquence peut être réglée entre 16khz et 48khz.
Augmenter la fréquence permet d’obtenir un fonctionnement plus doux des moteurs, réduit le couple à bas régime, mais dissipe un peu plus de puissance dans les MOSFET (Pertes de commutations)
et réduit la résolution des commandes.
Dans certains cas, il est possible de résoudre les problèmes de ‘mid throttle oscillation’
(oscillations à mi-gaz) en décalant cette fréquence PWM (augmentation par paliers pour voir si cela est effficace).
Nota : Le changement de la fréquence PWM change aussi le bruit du moteur.
Conclusion
Les paramètres par défaut sont en principe corrects pour la plupart des moteurs.
Les paramètres à optimiser si besoin :
– PWM Frequency : Augmentation = fonctionnement plus doux du moteur, réduction des ‘mid throttle oscillations’.
– Motor Timing : Augmentation = Réduction du risque de désynchronisation, Augmentation du couple. (Augmentation légère de la consommation, jusqu’à 25°)
– Rampup Power : Réduction = Diminution des pics de courant. Réponse moteur plus douce. Réduction des perturbation électromagnétiques.
Faut-il préférer un ESC sous BLHeli 32 ?
Ils sont souvent plus chers, mais proposent des fonctionnalités permettant de trouver des solutions à certains problèmes.
En particulier, la possibilité de régler la fréquence PWM, ce qui peut faire disparaitre les ‘mid throttle oscillations’.
Compléments
Documentation BLHeli 32 : Télécharger
Vidéo Joshua Bardwell & Ryan Harrell : BLHeli 32 100% explained / Youtube
Oscar Liang : BLHeli settings
Dom FPV : : Protocoles ESC / Youtube
Mini Quad Test Bench (Ryan Harrell) : ESC Basics
Oscar Liang : Base de données ESC





