Rescue Mode
Le ‘Rescue Mode’ de Betaflight permet de ramener automatiquement la machine vers le point de départ (point défini à l’armement).
Ce mode peut être déclenché sur un interrupteur (par exemple en cas de perte du retour vidéo) ou automatiquement sur failsafe (perte de la liaison avec la radiocommande)
Lorsque que la distance est réduite par le retour en automatique, la liaison radiocommande / vidéo est rétablie (Enfin, on l’espère), on doit alors reprendre le pilotage en sortant du ‘Rescue Mode’ par l’interrupteur ou dans le cas du ‘failsafe’ le retour est automatique, il ne faut donc pas avoir coupé les gaz …
Le ‘Rescue Mode’ ne permet pas un atterrissage automatique. Si l’on ne reprend pas la main sur le pilotage de la machine, le contact avec le sol peut être plus ou moins dur.
Version : Betaflight 4.1.x
Le Rescue Mode nécessite :
- un module GPS (GPS, Galileo, Glonass, …)
- Accéromètre activé (nécessaire au contrôle de l’assiette en vol)
- Optionnel : un compas magnétique (le GPS ne permet pas de connaitre l’orientation sans déplacement)
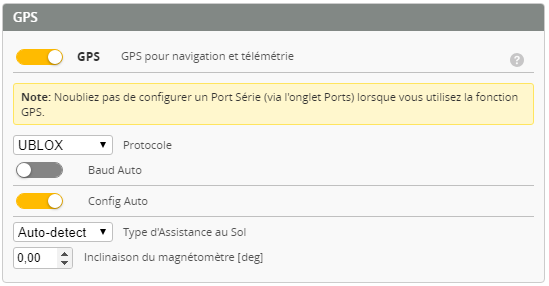
Configuration GPS
Configuration Compas Magnétique

Activation du ‘Rescue Mode’ par interrupteur

Listes des paramètres spécifiques
Altitude atteinte lors du passage en ‘Rescue Mode’
gps_rescue_alt_mode = [MAX_ALT, FIXED_ALT, CURRENT_ALT]
- MAX_ALT : Ancien paramètre (avant BF 4.1, Montée à l’altitude définie par gps_rescue_initial_alt ou altitude maxi atteinte en vol + 15m
- FIXED_ALT : Altitude définie par gps_rescue_initial_alt
- CURRENT_ALT : Retour en maintenant l’altitude au moment du passage en ‘Rescue Mode’
gps_rescue_initial_alt = [valeur] (50m par défaut)
Vitesse de retour
en cm/s
gps_rescue_ground_speed=[valeur] (2000 par défaut)
2000 = 20m/s = 72 km/h
1500 = 15m/s = 54 km/h
Vitesse de montée
en cm/s
gps_rescue_ascend_rate = [valeur] (500 par défaut)
500 = 5m/s = 18km/h
Vitesse de descente
en cm/s
gps_rescue_descend_rate = [valeur] (150 par défaut)
150 = 1.5m/s = 5.4km/h
Angle maxi du multicopter
en °
gps_rescue_angle=[valeur] (32 par défaut)
Remarques :
Avec un fort vent de face et un angle trop faible le multicopter ne pourra pas revenir.
Avec un angle élevé, il pourrait être difficile de stabiliser l’altitude.
Distance de début de descente (par rapport au point de décollage)
en m
gps_rescue_descent_dist =[valeur] (200m par défaut)
Nombre de satellites minimum pour que ‘Rescue Mode’ soit opérationnel
gps_rescue_min_sats = [valeur] (8 par défaut, 5 au minimum)
A l’armement, si le nombre de satellite n’est pas atteint, le Rescue Mode sera non fonctionnel.
En cours de vol, si le nombre de satellites passe en dessous de cette valeur, le Rescue Mode est momentanéement désactivé (jusqu’au retour du nombres de satellites …)
Autoriser l’armement sans fix GPS
gps_rescue_allow_arming_without_fix = ON
En cas d’armement sans le nombre de satellites requis ou sans fix GPS, le Rescue Mode est non opérationnel.
Rescue Mode automatique en Failsafe
failsafe_procedure = GPS-RESCUE
Contrôles d’intégrité
gps_rescue_sanity_checks = [RESCUE_SANITY_ON,RESCUE_SANITY_FS_ONLY]
RESCUE_SANITY_ON
Le ‘Rescue Mode’ n’est activé et maintenu que si :
Le GPS est connecté
Le GPS envoi une position valide
Le multicopter n’a pas pris un gros choc (détection de crash)
Nombre de satellites supérieur ou égal à gps_min_sats
Le multicopter se rapproche de sont point de départ.
Si ces conditions ne sont pas remplies, le ‘Rescue Mode’ est annulé, le multicopter tombe.
RESCUE_SANITY_FS_ONLY
Les conditions ne sont vérifiées qu’en cas de Failsafe.
Distance minimum d’activation du Rescue Mode (par rapport au point de départ)
en m
gps_rescue_min_dth = [valeur] (100m par défaut)
A distance inférieure, en cas de failsafe, le multicopter tombe.
Prise en compte du point de départ
Le point de départ est pris en compte à l’armement.
Pour éviter une modification du point de départ sur un autre armement :
gps_set_home_point_once = ON
Menu failsafe
Une partie des paramètres est configurable dans l’interface du configurateur dans la zone ‘Failsafe’.
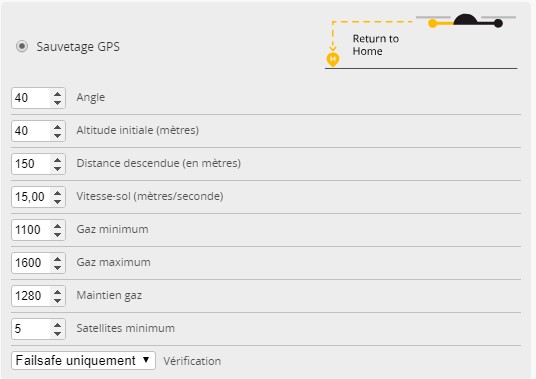
Exemple de configuration (par CLI)
set gps_rescue_alt_mode = FIXED_ALT
set gps_rescue_initial_alt = 40
set gps_rescue_ground_speed = 1500
set gps_rescue_angle = 40
set gps_rescue_descent_dist = 150
set gps_rescue_min_sats = 5
set gps_rescue_allow_arming_without_fix = ON
set failsafe_procedure = GPS-RESCUE
set gps_rescue_sanity_checks = RESCUE_SANITY_FS_ONLY
set gps_set_home_point_once = ON
save




